关节型机器人 工业自动化的灵活助手
关节型机器人,作为工业机器人中最常见、应用最广泛的一类,其设计灵感来源于人类的手臂结构。它通过一系列旋转关节来模拟肩、肘、腕等部位的运动,从而在三维空间内实现高度的灵活性和精确的操作能力。这种仿生设计使其成为现代智能制造、装配、焊接、喷涂等领域的核心设备。
关节型机器人的核心结构通常包括基座、大臂、小臂和手腕等部分,由多个旋转关节连接而成。最常见的为六轴关节机器人,拥有六个旋转自由度,能够实现接近人类手臂的全方位运动。每个关节由伺服电机驱动,并配备高精度减速器,确保运动的平稳与精准。其控制系统如同机器人的“大脑”,通过编程来规划运动轨迹、控制速度和力度,并与外部传感器、视觉系统协同工作,完成复杂的任务。
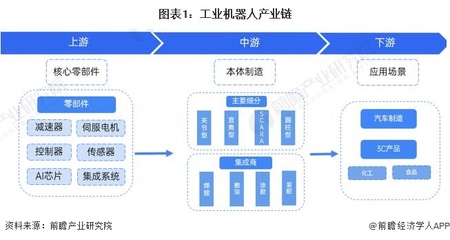
相比其他类型的机器人(如直角坐标机器人、SCARA机器人),关节型机器人的最大优势在于其工作空间大、灵活性高。它能够轻松地绕过障碍物,以多种姿态到达工作点,特别适合在复杂、拥挤的生产线上作业。从汽车制造业的精准点焊与喷涂,到电子行业的精密装配,再到物流领域的码垛与搬运,关节型机器人无处不在,极大地提升了生产效率和产品质量的一致性。
随着技术的发展,关节型机器人正朝着更智能、更协作、更易用的方向演进。一方面,通过集成人工智能与机器学习算法,机器人能够自主适应环境变化、优化操作流程。另一方面,轻量化设计与力控传感器的应用催生了“协作机器人”,它们无需安全围栏即可与人类并肩工作,开辟了人机协作的新篇章。云平台和数字孪生技术的应用,使得机器人的远程监控、预测性维护和离线编程成为可能,进一步降低了使用门槛和运维成本。
关节型机器人将继续作为工业4.0和智能工厂的基石。它们将与物联网、大数据深度融合,构建更加柔性、自适应的生产系统。其应用领域也将从传统的工业制造向医疗手术、生活服务、太空探索等更广阔的疆域拓展,持续推动社会生产力的变革与进步。
如若转载,请注明出处:http://www.geyoy.com/product/14.html
更新时间:2026-06-19 20:51:41